DonkeyCarの起動
ステアリング微調整
校准微调
现在小车已经校准过了,可以开动小车查看是否按照预期运行:
1、运行 python manage.py drive 命令启动小车
2、在浏览器中访问 <your_cars_ip_address>:8887
3、按j,一直到小车的方向完全转向右边
4、按i,一直到小车的方向完全朝向前方
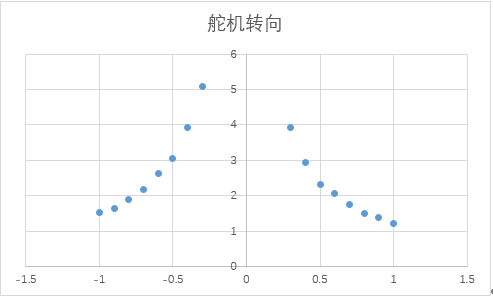
5、测量转弯直径,并将它记录在表格中
6、在不同的转向值下重复同样的测量
7、绘制表格看看小车在各个方向的转向是否相同(角度相同时) 如果你的转向在80%PWM和100%PWM相同时,将PWM值变为80%PWM, 如果你的车往一边偏,改变另一边的PWM值 经过微调之后你的表格大概会是这个样子
カメラ映像チェック
#1 Car (魚眼レンズ、なぜかかなりボケる)
#2 Car (魚眼レンズ)
#3 Car (普通レンズ、視角は狭い)
#4 Car (魚眼レンズ、こちらも少しピンボケ)