
車体構成 訓練データ作成 #2 Car (魚眼レンズ) Video1 https://www.youtube.com/watch?v=zdzHHErtAmE 自動運転録画 Video1 Auto Video 在 Instagram 查看这篇帖子 LA & DonkeyCar Read more

作成中です!!! Read more

CCP爆走覇γ をDonkeyCarに改造してする。 改造前 ステアリングの改造 ステアリングのはサーボではなく、ただのモータだから、大変そう! サーボを分解して、回路を利用する。 改造完成 Read more

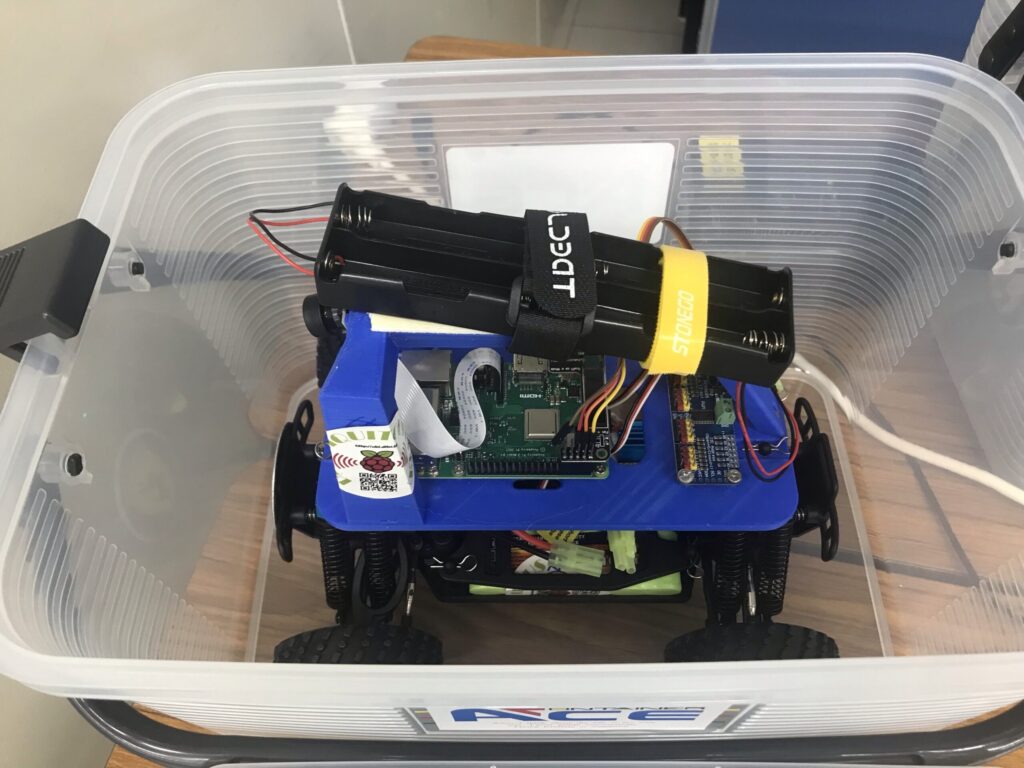
ブランド:HSP 商品番号:94186 のDonkeyCarは4台揃いました。 DonkeyCar001ー004 カメラ映像チェック #1 Car (魚眼レンズ、なぜかかなりボケる) #2 Car (魚眼レンズ) #3 Car (普通レンズ、視角は狭い) #4 Car (魚眼レンズ、こちらも少しピンボケ) Read more
試作品 こちらESCと受信機が一体になるので、受信機を取り外すと、別途ESCを自作(購入)する必要。 Piの電源はバッテリパックを乗せることになった。 based on the WL Toys chassis: https://a360.co/2S7GaqI スペック https://www.youtube.com/watch?v=VB6T33zoo3g 特徴: ローリング軸受セット。 ショックアブソーバを採用した設計。 高機能デジタルロボットサーボ。 小型、手のひらのサイズ。 2.4GHzの無線送信機。 スピードは毎時30キロまでに到達。 独立したサスペンションの4つの車輪。 仕様: Read more
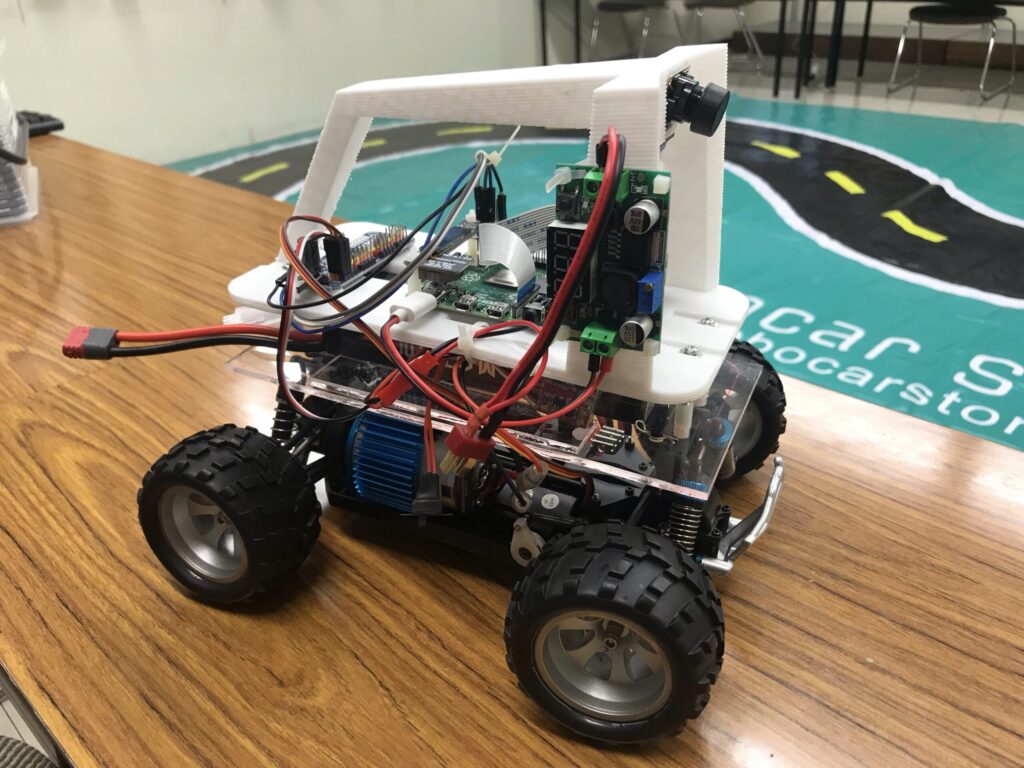
試作品 この車体はESCと受信機が一体になる特殊構造なので、現在Donkey Carとして試作する方法を鋭意研究中である。ご期待ください。 ESCの改造 こちらESCと受信機が一体になるので、受信機を取り外すと、別途ESCを自作(購入)する必要。 サーボの改造 さらにサーボも3線式ではなく、5線式である。 5線式サーボの中身には制御基板がなく、モータとポテンションメータだけが入ってます。 配線は以下となってます。 赤 モータ- 茶 モータ+ 緑 ポテンション1 黄 ポテンション2(中央) 橙 ポテンション3 3線式への変換基板が探す、または同じサーズの3線式サーボを交換する。 ベースの改造 車体は標準のHSP車体より少し短く、そして固定用穴の間隔も幅広いので、3Dプリントのベースは改造する必要がある。 スペック 通常1/10モデル使用する巨大モーターを実装、最高速度:70km / Read more

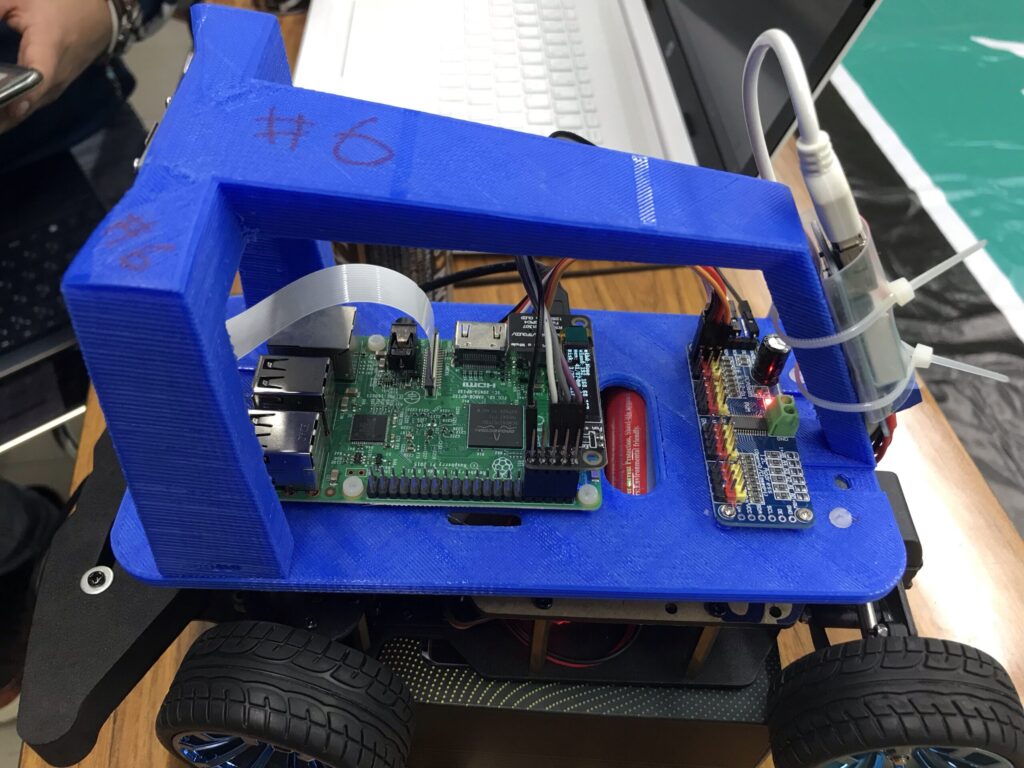
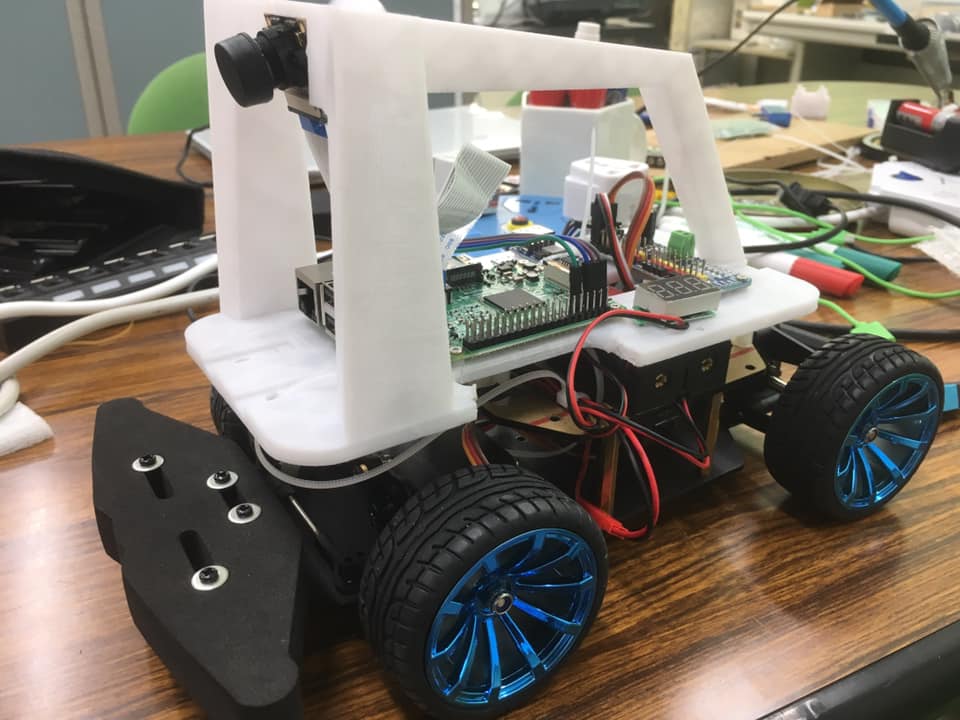
試作品車体構成 初代DonkeyCarです。Fabo Storeから購入した車体。 ブランド:HSP 商品番号:94186 在 Instagram 查看这篇帖子 Hong Chen (@hchen420) 分享的帖子 スペック 説明: 基本情報 ブランド:HSP 商品番号:94186 スケール:1/16 Read more
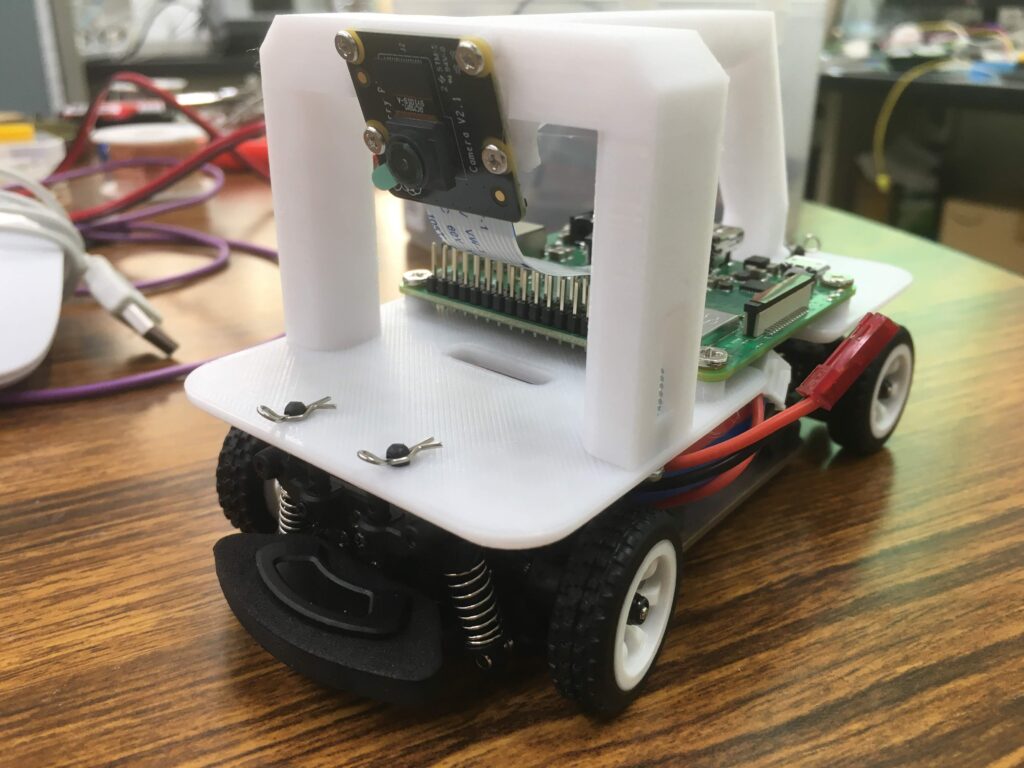
RC Smart Car Chassis KitをDonkey Car車体として 試作品 DonkeyCarの仕様では、サーボ、ESCなどいわゆる普通のPWMで動かすタイプのようだ。 PWMでスピードコントローラー(ESC)が制御できる事 PWMで前輪用サーボ(Steering Servo)が制御できる事 車台の上の、 前輪用サーボはPWMだが、モーターのコントローラーがない。そのためRC Car 10A Brushed ESC Two Way Motor Read more